 Minotauromaquia
Minotauromaquia
Vous avez construit un clawbot mais il ne fait rien car vous ne l'avez pas programmé. Cette page vous guidera pas à pas dans la programmation de votre clawbot.
Pas
- 1
 Obtenez l'environnement de programmation. Vous pouvez télécharger RobotC gratuitement ici: http://www.robotc.net/download/vexrobotics/
Obtenez l'environnement de programmation. Vous pouvez télécharger RobotC gratuitement ici: http://www.robotc.net/download/vexrobotics/ -
 2 Créez un nouveau bit de code. Allez dans Fichier / Nouveau / Nouveau fichier. Vous pouvez également utiliser un «modèle de compétition» si vous prévoyez d'utiliser ce code lors d'une compétition. Mais si vous testez simplement votre robot, «Nouveau fichier» fonctionne.
2 Créez un nouveau bit de code. Allez dans Fichier / Nouveau / Nouveau fichier. Vous pouvez également utiliser un «modèle de compétition» si vous prévoyez d'utiliser ce code lors d'une compétition. Mais si vous testez simplement votre robot, «Nouveau fichier» fonctionne. -
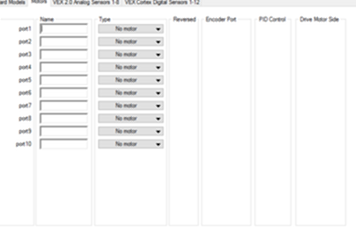 3 Configurez les moteurs. Accédez à la page de configuration des moteurs et des capteurs (robot / moteurs et capteurs). Lorsque la boîte apparaît, entrez le nom de votre moteur (tout ce que vous voulez, mais restez avec les éléments comme recto droit et ascenseur) dans le numéro de port correspondant. Utilisez le menu déroulant sur la droite pour sélectionner le type de moteur que vous utilisez et vérifiez si vous avez besoin de l'inverser ou non. Vous pouvez utiliser les essais et les erreurs pour savoir s'il doit être inversé ou non.
3 Configurez les moteurs. Accédez à la page de configuration des moteurs et des capteurs (robot / moteurs et capteurs). Lorsque la boîte apparaît, entrez le nom de votre moteur (tout ce que vous voulez, mais restez avec les éléments comme recto droit et ascenseur) dans le numéro de port correspondant. Utilisez le menu déroulant sur la droite pour sélectionner le type de moteur que vous utilisez et vérifiez si vous avez besoin de l'inverser ou non. Vous pouvez utiliser les essais et les erreurs pour savoir s'il doit être inversé ou non. - 4 Code la boucle while. Vous voudrez vous assurer que tout le code pour contrôler vos moteurs est dans un type de boucle while infinie. Cela permettra à votre programme de fonctionner sans problème, car il vérifie constamment si le contrôleur demande à un moteur de bouger.
tâche principale() tandis que(1==1)
- 5 Code les roues. Si vous avez quatre moteurs pour vos roues, vous pouvez configurer vos moteurs deux de chaque côté. Le code ressemble à ceci:
moteur[leftF] = vexRT[Ch3]; moteur[LeftB] = vexRT[Ch3]; moteur[rightF] = vexRT[Ch2]; moteur[rightB] = vexRT[Ch2];
Cela prend un moteur spécifique et l'assigner à un canal; dans ce cas, soit 3 ou 2. Ce sont les axes y des manettes. Le code prend automatiquement la position du joystick et donne aux roues le nombre de tours requis (rotations par minute). - 6 Code l'ascenseur. Cela soulèvera et abaissera le bras sur lequel se trouve votre griffe.
si(vexRT[Btn5U]==1) moteur[Ascenseur]=127; autre si(vexRT[Btn5D]==1) moteur[Ascenseur]=-127; autre moteur[Ascenseur]=0;
Il est dit: Si vous maintenez Btn5U enfoncé, le moteur de levage tourne en avant (dans le sens des aiguilles d’une montre) à la vitesse de 127 tr / min. Si cela ne se produit pas, appuyez sur Btn5D, si cela est vrai, faites tourner le moteur vers l'arrière (dans le sens inverse des aiguilles d'une montre). Si rien de cela ne se produit, ne pas tourner le moteur du tout. - 7 Ajoutez le code de griffe.
si(vexRT[Btn5U]==1) moteur[Ascenseur]=127; autre si(vexRT[Btn5D]==1) moteur[Ascenseur]=-127; autre moteur[Ascenseur]=0;
Ce code ressemble beaucoup au code lift, mais au lieu de Btn5U et Btn5D, il utilise Btn6U et Btn6D. Cela signifie que vous utilisez un jeu de boutons différent sur votre manette pour l'ascenseur et la griffe. L'autre différence est que ce bit de code active la «griffe» du moteur plutôt que la «portance» du moteur. -
 8 Testez et adaptez votre nouveau code. Une fois votre code terminé, compilez-le et téléchargez-le sur votre clawbot (Windows - F5).
8 Testez et adaptez votre nouveau code. Une fois votre code terminé, compilez-le et téléchargez-le sur votre clawbot (Windows - F5). - Vous pouvez modifier les boutons qui activent les moteurs et modifier le régime des moteurs. Le plus rapide des moteurs standard 393 peut aller à 127 tr / min.
- 9 N'hésitez pas à jouer avec le code et à trouver ce qui fonctionne pour vous. Il existe d'autres moyens de faire la même chose en utilisant robotC, mais ce qui précède est le plus facile à créer et à comprendre.
 Obtenez l'environnement de programmation. Vous pouvez télécharger RobotC gratuitement ici: http://www.robotc.net/download/vexrobotics/
Obtenez l'environnement de programmation. Vous pouvez télécharger RobotC gratuitement ici: http://www.robotc.net/download/vexrobotics/  2 Créez un nouveau bit de code. Allez dans Fichier / Nouveau / Nouveau fichier. Vous pouvez également utiliser un «modèle de compétition» si vous prévoyez d'utiliser ce code lors d'une compétition. Mais si vous testez simplement votre robot, «Nouveau fichier» fonctionne.
2 Créez un nouveau bit de code. Allez dans Fichier / Nouveau / Nouveau fichier. Vous pouvez également utiliser un «modèle de compétition» si vous prévoyez d'utiliser ce code lors d'une compétition. Mais si vous testez simplement votre robot, «Nouveau fichier» fonctionne.  3 Configurez les moteurs. Accédez à la page de configuration des moteurs et des capteurs (robot / moteurs et capteurs). Lorsque la boîte apparaît, entrez le nom de votre moteur (tout ce que vous voulez, mais restez avec les éléments comme recto droit et ascenseur) dans le numéro de port correspondant. Utilisez le menu déroulant sur la droite pour sélectionner le type de moteur que vous utilisez et vérifiez si vous avez besoin de l'inverser ou non. Vous pouvez utiliser les essais et les erreurs pour savoir s'il doit être inversé ou non.
3 Configurez les moteurs. Accédez à la page de configuration des moteurs et des capteurs (robot / moteurs et capteurs). Lorsque la boîte apparaît, entrez le nom de votre moteur (tout ce que vous voulez, mais restez avec les éléments comme recto droit et ascenseur) dans le numéro de port correspondant. Utilisez le menu déroulant sur la droite pour sélectionner le type de moteur que vous utilisez et vérifiez si vous avez besoin de l'inverser ou non. Vous pouvez utiliser les essais et les erreurs pour savoir s'il doit être inversé ou non.  8 Testez et adaptez votre nouveau code. Une fois votre code terminé, compilez-le et téléchargez-le sur votre clawbot (Windows - F5).
8 Testez et adaptez votre nouveau code. Une fois votre code terminé, compilez-le et téléchargez-le sur votre clawbot (Windows - F5). Facebook
Twitter
Google+